Tactile Sensing

Tactile sensing is a major frontier that enables robotic systems to react quickly and meaningfully to touch. We develop modalities for tactile sensing that enable new methods of perception and control for real-world systems.
Thus far, our published work explored how suction flow rate measurements can be used to sense contact, in a way that is both remote from the end-effector and inexpensive. We’ve shown that this novel sensing modality is useful for industrial-style smart suction cup gripping in air and for underwater systems.
Continuing efforts:
- The design and control of tactile sensors for industrial applications through the Innovation Hong Kong Centre for Logistics Robotics.
- Exploring new remote tactile sensing modalities for marine and planetary tactile sensing.
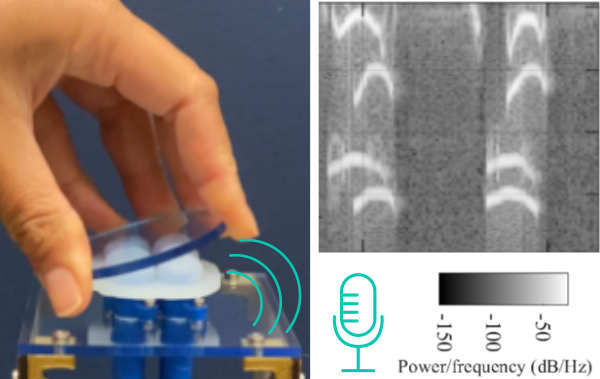
Resonant Pneumatic Tactile Sensing for Soft Grippers
This “singing” tactile sensor uses resonant chambers. The electronics-free soft gripper only needs a single offboard microphone to sense grasp state. Great option for harsh environments, where electronics must be protected.
This work achieved an array of AcousTac taxels, published in Soft Robotics.
AcousTac: Tactile sensing with pneumatic-driven acoustic resonance for electronics-free soft skin
We are also seeking to make this technology smaller and higher-pitched. Relevant preliminary work published at:
Milli-scale AcousTac sensing using soft Helmholtz resonators
Fast in-hand slip control on unfeatured objects with programmable tactile sensing
We’ve shown that a capacitive slip sensor can be used to estimate fast in-hand slip motions, even when the surface does not have a detectable surface texture or geometry.