
npj Robotics, March 2026
Galassi, A. Trebi-Ollennu, A., Papadodoulos, P., Stuart, H.S.
Publications
This page provides information on full-length articles.
Research videos can be found at our YouTube channel.
Open access versions of publications can be found at eScholarship.
Short-form conference and workshop abstracts.
Open source files are at our Github page.
Last updated: March 2026

Evaluating variable transmissions in body-powered prosthetic grasping
IEEE Transactions on Neural Systems and Rehabilitation Engineering, February 2026
Abbott, M.E., McPherson, A.I.W., Ho, F.D.K., Stuart, H.S.

Error recovery in wearable robotic co-grasping: The role of human-led correction
Frontiers in Robotics and AI, October 2025
Chang, E.Y., Torres, W.O., Stuart, H.S.

Agency-preserving robotic assistance for grasp slip recovery in body-powered prostheses
Frontiers in Robotics and AI, October 2025
Davis, B.U., Abbott, M.E., Stuart, H.S.

Free-ranging squirrels perform stable, above-branch landings by balancing using leg force and nonprehensile foot torque
Journal of Experimental Biology, April 2025
Lee, S, Wang, S, Kuang, D, Wang, E, Yim, J, Hunt, N, Fearing, RS, Stuart, HS, Full, RJ

Expanding functional workspace for people with c5-c7 spinal cord injury with supernumerary dorsal grasping
IEEE Transactions on Neural Systems and Rehabilitation Engineering, December 2024
Lee, J, McPherson, AI, Huang, H, Yu, L, Gloumakov, Y, Stuart, HS

AcousTac: Tactile sensing with pneumatic-driven acoustic resonance for electronics-free soft skin
Soft Robotics, February 2025
Li, M, Stuart, HS
Smartphone haptics for tactile temporal discrimination: Preliminary insights into measurement of function
International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), May 2025
Torres, W, Abbott, M, Stuart, HS
Synchronicity: A measure of multi-joint movement coordination in device assessment
International Conference on Rehabilitation Robotics (ICORR), May 2025
Gloumakov, Y, Stuart, HS

Milli-scale AcousTac sensing using soft Helmholtz resonators
PREPRINT: International Conference on Robotics and Automation (ICRA), May 2025
Aderibigbe, J, Li, M, Stuart, H.S.

A tugging controller that maximizes lateral resistive force by mounding sandy terrain
PREPRINT: International Conference on Robotics and Automation (ICRA), May 2025
Moon, D, Huang, C, Page, J, Stuart, H.S.

Haptic contour following with the smart suction cup
International Conference on Intelligent Robots and Systems (IROS), July 2024
Sebastian Lee, Jungpyo Lee, Hannah Stuart

Fast in-hand slip control on unfeatured objects with programmable tactile sensing
IEEE Robotics and Automation Letters, May 2024
Yuri Gloumakov; Tae Myung Huh; Hannah S. Stuart

Robotically adjustable kinematics in a wrist-driven orthosis eases grasping across tasks
Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC) -- ArXiV preprint, July 2024
Chang, E. Y., McPherson, A. I., & Stuart, H. S.

A Grasp Taxonomy for People with C5-7 Spinal Cord Injury
Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC) PREPRINT, July 2024
McPherson, A. I. [Andrew I.W.], Adachi, K., Gloumakov, Y., & Stuart, H. S.
Nonlinear modeling for soft pneumatic actuators via data-driven parameter estimation
International Conference on Advanced Intelligent Mechatronics (AIM) -- ArXiV preprint, July 2024
Yang, W.-T., Stuart, H. S., Kurkcu, B., & Tomizuka, M.
A case study of student-community interaction through an education-first assistive device design class
ASEE Annual Conference, July 2024
Stuart, H. S., Torres, W. O., & McPherson, A. I.

Regrasping on printed circuit boards with the smart suction cup
International Conference on Robotics and Automation (ICRA), May 2024
Lee, J., Sun, Z., Dong, Z., Chen, F., & Stuart, H. S.

Squirrel-inspired tendon-driven passive gripper for agile landing
International Conference on Robotics and Automation (ICRA), May 2024
Wang, S. J., Kuang, D., Lee, S. D., Full, R. J., & Stuart, H. S.
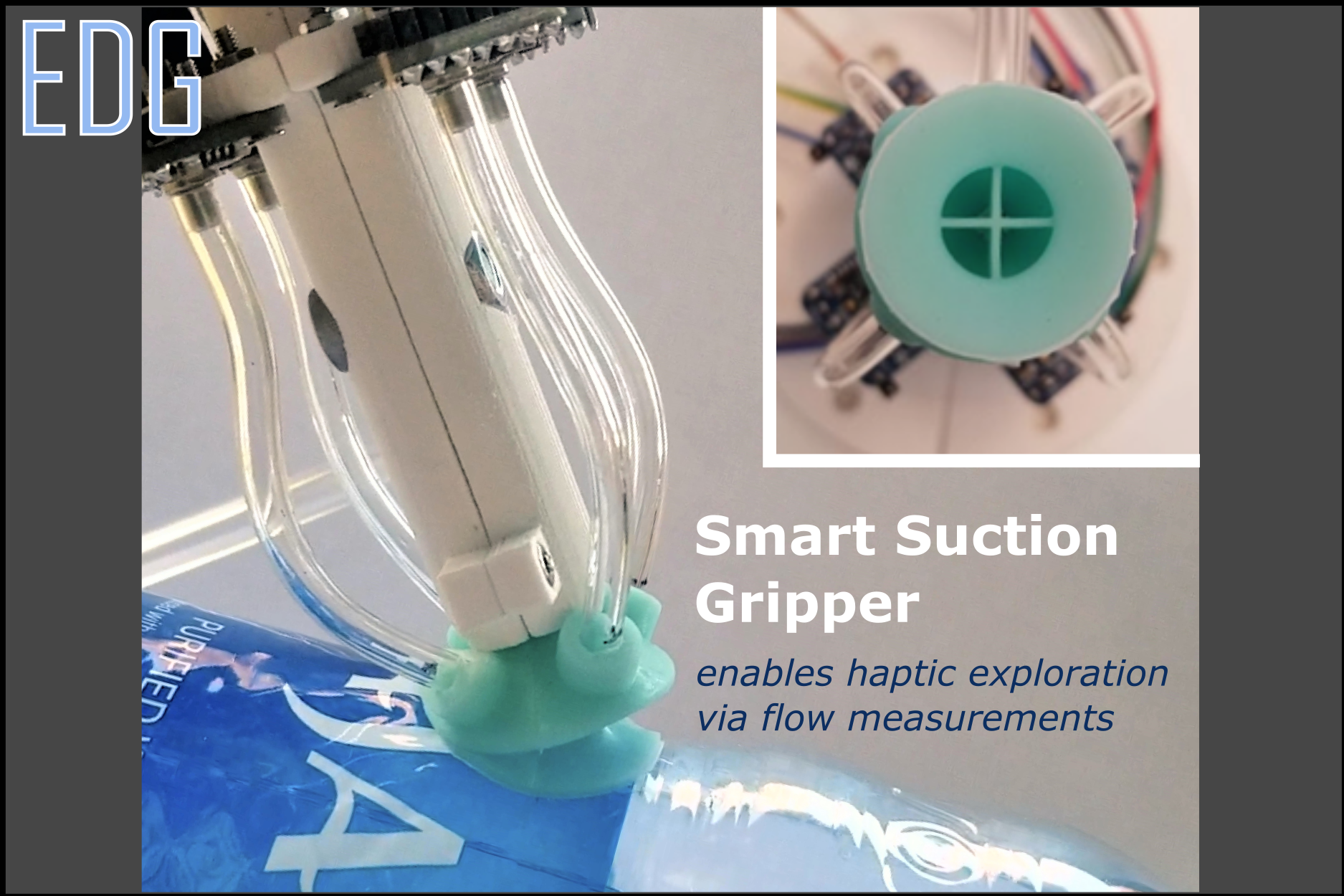
Haptic search with the smart suction cup on adversarial object
IEEE Transactions on Robotics (T-RO), Nov 2023
Jungpyo Lee, Sebastian D. Lee, Tae Myung Huh, Hannah S. Stuart

Skin Sensitivity Assessment Using Smartphone Haptic Feedback
IEEE Open Journal of Engineering in Medicine and Biology, Oct 2023
Torres, W. O. [Wilson O], Abbott, M. E., Wang, Y., & Stuart, H. S.

Modulating Wrist-Hand Kinematics in Motorized Assisted Grasping With C5-6 Spinal Cord Injury
IEEE Transactions on Medical Robotics & Bionics (T-MRB), Oct 2023
Chang, E., McPherson, A. I., Adolf, R., Gloumakov, Y., & Stuart, H. S.

Self-care selfies: Patient-uploaded videos capture meaningful changes in dexterity over 6 months
Annals of Clinical and Translational Neurology, Oct 2023
Gopal, A., Torres, W. O. [Wilson O.], Winawer, I., Poole, S., Balan, A., Stuart, H. S., Fritz, N. E., Gelfand, J. M., Allen, D. D., & Bove, R.

Push-pull locomotion: Increasing travel velocity in loose regolith via induced wheel slip
Journal of Terramechanics, August 2023
Cyndia Cao, Deaho Moon, Colin Creager, Dennis K. Lieu, Hannah S. Stuart

Tap and swipe smartphone gestures indicate hand tremor and finger joint range of motion
2023 IEEE Eurasia Conference on Biomedical Engineering, Healthcare and Sustainability (ECBIOS), August 2023
Wilson O. Torres, Hannah S. Stuart

Efficient reciprocating burrowing with anisotropic origami feet
Frontiers in Robotics and AI, July 2023
Sareum Kim, Laura Treers, Tae Myung Huh, Hannah S. Stuart

A wearable testbed for studying variable transmission in body-powered prosthetic gripping
International Conference on Rehabilitation Robotics (ICORR), June 2023
Andrew McPherson, Michael Abbott, Weston White, Yuri Gloumakov, Hannah S. Stuart

Characterizing the force-motion tradeoff in body-powered transmission design
IEEE Transactions on Neural Systems and Rehabilitation Engineering (T-NSRE), July 2023
Michael Abbott, Hannah S. Stuart

Walk-Burrow-Tug: Legged anchoring analysis using RFT-based granular limit surfaces
IEEE Robotics and Automation Letters, April 2023
Tae Myung Huh, Cyndia Cao, Jadesola Aderibigbe, Deaho Moon, Hannah S. Stuart
Mechanical modeling and optimal model-based design of a soft pneumatic actuator
International Conference on Soft Robotics (RoboSoft), February 2023
Wu-Te Yang, Hannah S. Stuart, Masayoshi Tomizuka

Bioinspired tearing manipulation with a robotic fish
International Conference on Robotics and Automation (ICRA), January 2023
Stanley Wang, Juan Romero, Monica Li, Peter Wainwright, Hannah S. Stuart

The Robustness of Tether Friction in Non-idealized Terrains
IEEE Robotics and Automation Letters, December 2022
Justin Page; Laura Treers; Steven Jens Jorgensen; Ronald Fearing; Hannah S Stuart

Mole crab-inspired vertical self-burrowing
Frontiers in Robotics and AI, Oct 2022
Laura Treers, Ben McInroe, Robert Full, Hannah S Stuart

Resonant pneumatic tactile sensing for soft grippers
IEEE Robotics and Automation Letters, July 2022
Monica S. Li; Tae Myung Huh; Christopher R. Yahnker; Hannah S. Stuart

Effect of variable transmission on body-powered prosthetic grasping
International Conference on Rehabilitation Robotics (ICORR), June 2022
Michael E. Abbott, Andrew I.W. McPherson, Wilson O. Torres, Keilani Adachi, and Hannah S. Stuart

Tenodesis Grasp Emulator: Kinematic Assessment of Wrist-Driven Orthotic Control
arXiv.org (Accepted to ICRA 2022), Nov 2021
Erin Y. Chang, Raghid Mardini, Andrew I. W. McPherson, Yuri Gloumakov, Hannah S. Stuart

Mobility Experiments Assessing Performance of Front-Back Differential Drive Velocity on Sandy Terrain
2021 Proceedings of the ISTVS 20th International Conference, Montréal, Québec, Canada, In Press
Cao, C., Creager C., Lieu, D.K, Stuart, H.S.
A Multi-Chamber Smart Suction Cup for Adaptive Gripping and Haptic Exploration
IEEE International Conference on Intelligent Robots and Systems (IROS), Dec 2021
Tae Myung Huh, Kate Sanders, Michael Danielczuk, Monica Li, Ken Goldberg, Hannah S. Stuart
Bio-inspired Geotechnical Engineering: Principles, Current Work, Opportunities and Challenges
Géotechnique, April 2021
Alejandro Martinez, Jason DeJong, et. al.

Dynamic Analysis of Gyroscopic Force Redistribution for a Wheeled Rover
2021 ACSE Earth and Space, April 2021
Cyndia A. Cao, Dennis K. Lieu, Hannah S. Stuart
Kinesthetic feedback improves grasp performance in cable-driven prostheses
2021 IEEE International Conference on Robotics and Automation (ICRA), Oct 2021
Michael E. Abbott, Joshua D. Fajardo, H.W. Lim, and Hannah S. Stuart

Assistive supernumerary grasping with the back of the hand
2021 IEEE International Conference on Robotics and Automation (ICRA), Oct 2021
Jungpyo Lee, Licheng Yu, Lucie Derbier and Hannah S. Stuart
Granular Resistive Force Theory Implementation for Three-Dimensional Trajectories
Robotics and Automation Letters, February 2021
Laura K. Treers, Cyndia Cao, Hannah S. Stuart
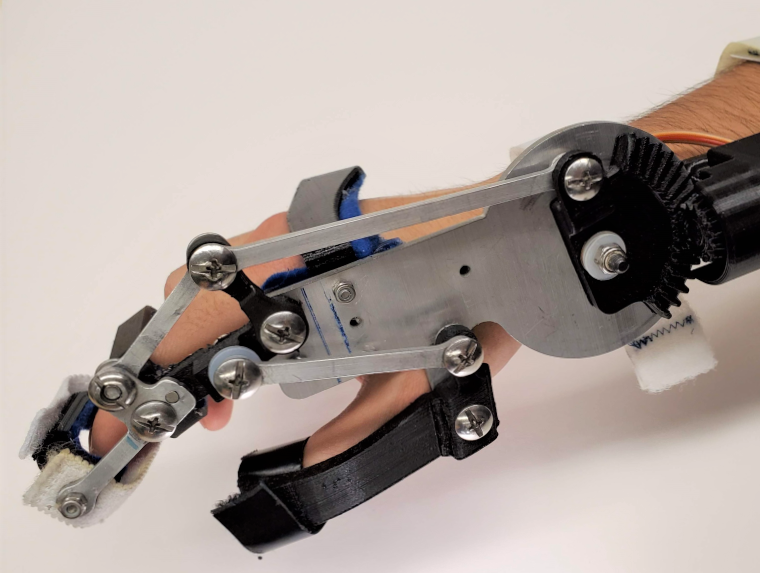
Motor-Augmented Wrist-Driven Orthosis: Flexible Grasp Assistance for People with Spinal Cord Injury
International Conferences of the IEEE Engineering in Medicine and Biology Society (EMBC), Aug 2020
Andrew I. W. McPherson, Vatsal V. Patel, Phillip R. Downey, Ahmed Abbas Alvi, Michael E. Abbott and Hannah S. Stuart

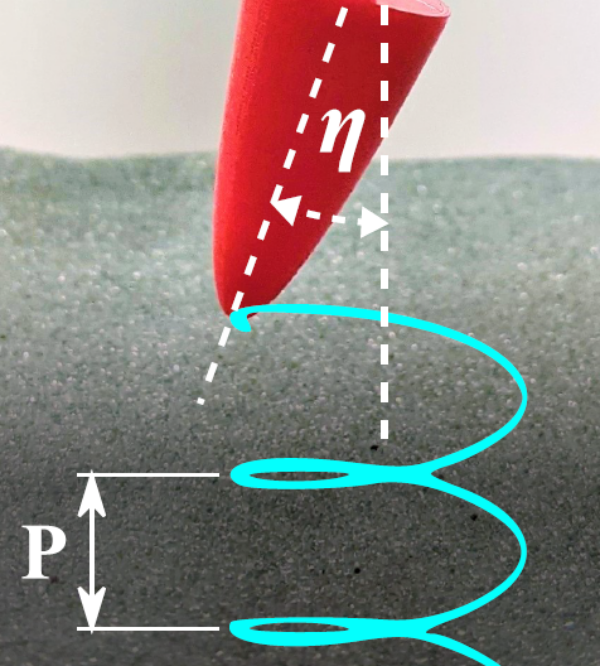
Milliscale features increase friction of soft skin in lubricated contact
Robotics and Automation Letters, June 2020
Monica S. Li, Dominic Melville, Ethan Chung and Hannah S. Stuart
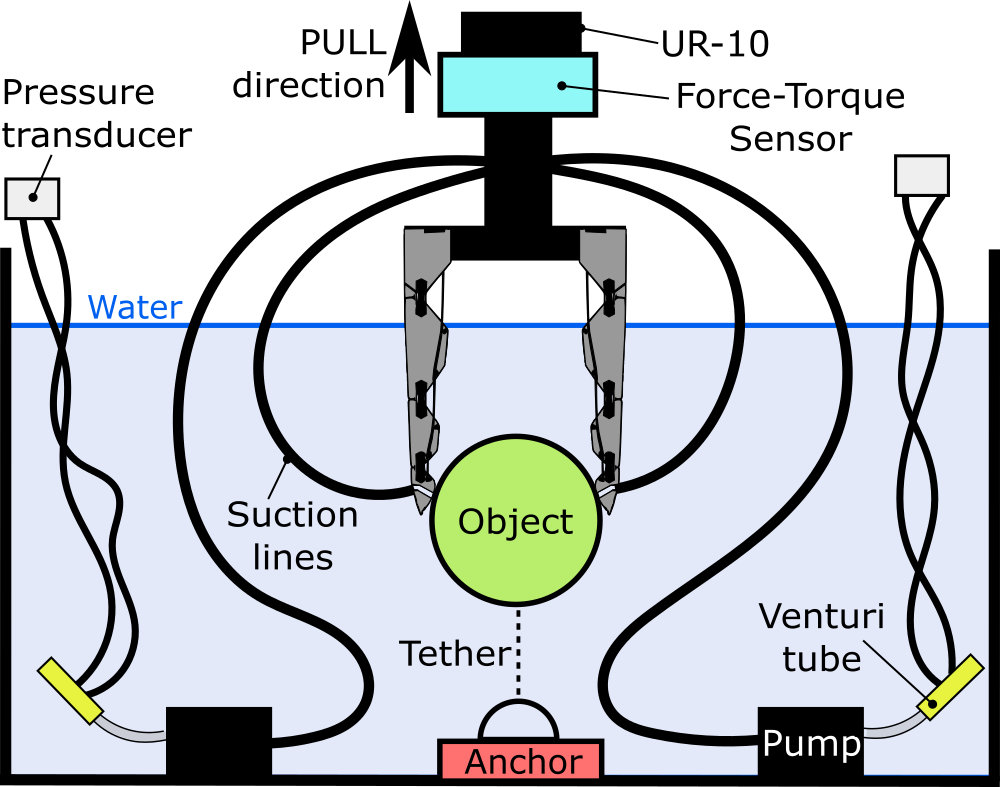
Tactile sensing based on fingertip suction flow for submerged dexterous manipulation
2020 IEEE International Conference on Robotics and Automation (ICRA), Sept 2020
Philippe Nadeau, Michael Abbott, Dominic Melville and Hannah S. Stuart

Hands in the Real World
Frontiers in Robotics and AI, Jan 2020
Francesca Negrello, Hannah S. Stuart, and Manuel G. Catalano

Design and Assessment of a Single-size Semi-soft Assistive Mitten for People with Cervical Spinal Cord Injuries
2019 IEEE-RAS International Conference on Humanoid Robots (Humanoids), Mar 2020
D. Kaneishi, J.E. Leu, J. O’Donnell, C. Affleck, R.P. Matthew, A. McPherson, M. Tomizuka, and H.S. Stuart
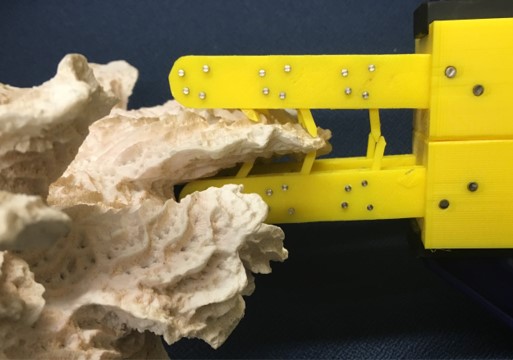
Gripper Design with Rotation-Constrained Teeth for Mobile Manipulation of Hard, Plating Corals with Human-Portable ROVs
2019 IEEE OCEANS Conference Proceedings , Oct 2019
M.S. Li, R. van der Zande, A. Hernandez-Agreda, P. Bongaerts and H.S. Stuart
Hybrid Control Interface of a Semi-soft Assistive Glove for People with Spinal Cord Injuries
2019 IEEE-RAS-EMBS International Conference on Rehabilitation Robotics Proceedings (ICORR), July 2019
D. Kaneishi, R.P. Matthew, J.E. Leu, J. O’Donnell, B. Zhang, M. Tomizuka and H.S. Stuart