IEEE International Conference on Intelligent Robots and Systems (IROS), Dec 2021
Tae Myung Huh, Kate Sanders, Michael Danielczuk, Monica Li, Ken Goldberg, Hannah S. Stuart
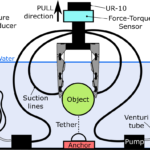
A Multi-Chamber Smart Suction Cup for Adaptive Gripping and Haptic Exploration
Abstract: “We present a novel robot end-effector for gripping and haptic exploration. Tactile sensing through suction flow monitoring is applied [More…] about A Multi-Chamber Smart Suction Cup for Adaptive Gripping and Haptic Exploration