IEEE Robotics and Automation Letters, July 2022
Monica S. Li; Tae Myung Huh; Christopher R. Yahnker; Hannah S. Stuart
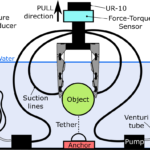
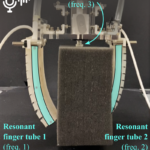
Resonant pneumatic tactile sensing for soft grippers
Abstract: “Soft robots capable of dexterous manipulation can enable the exploration of extreme environments. Equipping these robots with tactile sensing [More…] about Resonant pneumatic tactile sensing for soft grippers